パナソニック コネクト㈱は3月8日、ロボットハンドやロボットアーム等のロボット制御技術、センシング技術、AI技術を組み合わせて一元制御できる「ロボット制御プラットフォーム(本PF)」(※1)を開発したと発表した。同社ではすでに、物流や流通業で商品を倉庫から出荷するピッキング作業を行える「ロボットハンド制御技術」を発表(※2)している。
本PFは、そのロボット制御技術、市販のロボットアーム、センシングやカメラ等、物流倉庫でピッキングタスクを行う際に必要な多様なロボットシステムを一元制御できるWCS(Warehouse Control System)に位置づけられるもので、同社はこれをオープンプラットフォームとして開発した。さらに、現場作業者がロボットの専門業者を介さずに必要な作業を自身で設定可能なユーザーインターフェースを用意し、倉庫現場へのロボット導入、運用におけるシステム開発者の負担の大幅な削減を実現している。
物流業界では、時期や施策等の社会情勢による物流量の変動が大きく、必要となる設備、必要な人員の増減幅が大きいことが社会的な課題となっている。それに伴いピッキングロボットを導入することにより、必要な人員の増減を吸収し、昨今の人材不足の状況に対しても、柔軟な対応が可能になる。しかし、従来のロボット導入には専門のスキルを持つ人間が不可欠な上、ロボットの作業の設定に半日~1日、導入施工に1~2か月を要する等の時間とコストの点から企業側の負担が大きいという課題があった。
本PFでは、ロボットハンド、ロボットアーム、カメラなど複数のハードウェアを組み合わせた形でのロボット導入を容易にするほか、パナソニック コネクトが開発したロボットの吸着ハンドやグリッパーの制御技術と、カメラでのセンシング技術の組み合わせを切り替えることで、倉庫において変動する多様な商品へのソフトウェア サプライチェーン対応が可能になる。本PFは、「タスク最適化エンジン(仮称)」(※3)を通じて同社子会社である米Blue Yonderの上位システムとの連携にも対応しているため、上位システムからの入出荷情報や倉庫内のAutonomous Mobile Robot (AMR) と連携することで業務プロセスの改善に貢献する。
●「ロボット制御プラットフォーム」の特長
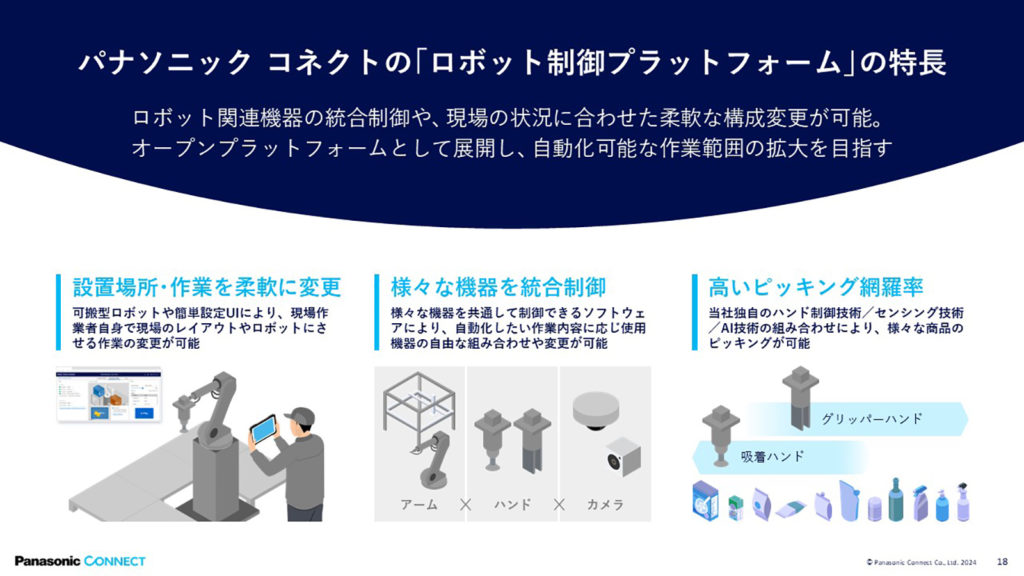
①現場作業者が保守、運用可能なユーザーインターフェース
現場作業者は、ロボットハンド、ロボットアーム、カメラ等をタブレット上で選択するだけで、ピッキング作業の設定変更が可能。また、ロボットのピッキング動作を規定するレシピの変更を行うことが可能で、レシピを再利用することにより、ロボットの専門スキルを有するシステム開発者の確保が不要となり、現場作業者にてレイアウト変更等に伴うロボットハンドやアームによるタスクの設定変更が可能。その結果、保守、運用の負担が飛躍的に軽減される。
② ロボット制御技術
商品を吸着して移動させる吸着技術と、グリッパーで把持した商品の位置や姿勢を変更できるインハンドマニピュレーション技術の2つのロボットハンド制御技術を開発。将来的に、同社では、物流倉庫におけるロボットの作業が、複数の商品が梱包されたケース単位の取り扱いだけではなく、多様な形状をもつ個々の商品を 個別にピッキングする必要性が高まると推測している。コンビニ等の多様な商品群を対象とし、吸着技術とインハンドマニピュレーション技術で約8割の商品をロボットが担当できると見込んでいる。ロボットが大半の商品をピッキング対象として扱うことで、人の作業負荷を軽減できる。
③ センシング技術
従来のセンシングの方式では、商品ごとに学習データを収集し、それを元にピッキング位置を学習させる必要があったが、今回開発した学習レス方式では、ピッキング特性が類似する商品形状をカテゴライズすることにより、ピッキング対象の3D形状からルールベースでピッキング位置を推定可能となり、学習不要になった。これにより、新商品が追加された際に迅速かつ正確にピッキング位置を推定可能で、学習方式では膨大な時間を要していた学習データ収集、並びに学習時間を大幅に削減できる。
④ ダイナミックに変動する倉庫レイアウトに柔軟設置可能
100V電源の利用でアンカーが不要。キャスターによる移動が可能で、工具を使うことなく設置が完了するため、物流倉庫のレイアウト変更に柔軟に対応可能。同社では、本PFをより多くのロボット関連企業に活用され、物流現場でのロボット導入の敷居を下げることで、業務の効率化に加えて新たなイノベーションが生まれることを期待している。また、引き続き、同社は「現場から 社会を動かし 未来へつなぐ」をパーパスにかかげ、現場にイノベーションをもたらすことで多様な人々が幸せに暮らせる、持続可能な社会の実現を目指すとしている。
※1:現在、技術開発中のもので17件特許出願中。
※2:今回の成果は、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)の助成事業の結果得られたもの
https://news.panasonic.com/jp/press/jn231019-1
※3:同社の「タスク最適化エンジン(仮称)」および「ラピュタロボティクスとの業務提携」についてパナソニック コネクトNewsroom参照
https://connect.panasonic.com/jp-ja/newsroom
なお、タスク最適化エンジン(仮称)は、現在技術開発中のもので13件特許出願中。
