TRUST SMITH㈱は10月26日、モデルレスでの高精度・高速なばら積みピッキングを可能とするピッキングシステム「ANY PICKER」の提供を開始した。

同製品は事前学習なしで、高速(0.1秒で認識)かつ高精度(99.99%)なピッキングを可能としており、あらゆる現場のピッキングタスクの省人化に大きく貢献する。
製造・物流の現場では、人口減少による労働力の不足が深刻な課題として存在しており、ロボットやAIによる自動化・効率化が求められる中、ロボットアームによるピッキング業務の代替は、工場・倉庫におけるDXの要としている。
従来のピッキングソフトウェアは、ピッキング対象物の事前登録または事前学習が必要で、事前にデータを用意できない対象物のピッキングはできなかった。例えば、扱う商品が数万単位で存在しているEC物流倉庫や、食品工場における唐揚げ等の不定形物のピッキング等は困難だった。そこで同社は、それらの課題を解決する独自のピッキングアルゴリズムを開発した。
●モデルレスピッキングシステムの特長
(1)ティーチングレスでのピッキングが可能
事前の学習なしでピッキングが可能なため、事前学習が困難な物体のピッキングも可能。扱う商品が頻繁に変わる現場での適応が可能となるほか、学習期間が不要なため技術理解がなくても短期間で導入可能。
(2)不定形物等の、認識の難しい物体にも対応
.png)
不定形物に対しても、吸着点を算出してピッキングに成功不定形物に対しても、吸着点を算出してピッキングに成功従来、認識が難しいとされていた下記の物体への対応が可能。
・不定形物(唐揚げ、洗剤の詰め替え等)
・金属光沢やプラスチック光沢を有する物体(金属部品、アルミホイル等)
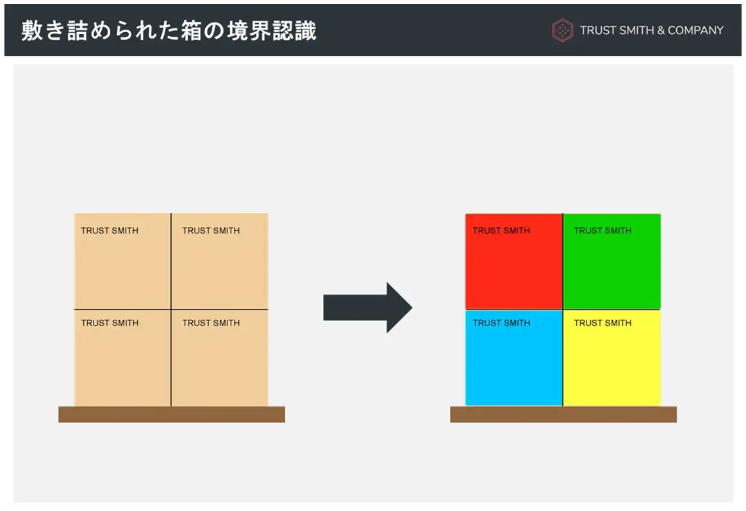
・平面に隙間なく敷き詰められた箱等の物体
・丸みを帯びた物体(カップ麺等)

下記の図のように、隙間なく敷き詰められた箱の境界の認識は深度画像だけでは難しいが、同システムではRGB画像から物体境界を検出し、吸着困難な候補を除外する。
(3)高速ピッキング
わずか0.1秒で吸着位置を算出でき、高速なピッキングを実現。それによりタクトタイムの厳しい現場でも実用可能。
(4)高精度なピッキング
50アイテムを対象としたピッキング試験(※1)の結果、99.99%の吸着成功率を記録した。
※1:カップ麺、洗剤の詰め替え、化粧品、スプレー缶、iPadの製品段ボールなど様々な形状、性質を持つ50アイテムに対して同一の条件(容器・照明など)で試験を行った。
●技術詳細
同システムの、認識から吸着までの流れは以下の通り。
(1)深度カメラ、RGBカメラにより吸着対象の深度画像とRGB画像を取得
(2)深度画像とRGB画像をフュージョン処理(※2)し、終着位置を算出
(3)経路計画・吸着
※2:フュージョン処理とは、複数の異なるタイプの画像データを組み合わせて処理することを指す。
