オムロン㈱は5月26日、オムロン サイニックエックス㈱(OSX)が自律ロボットに関する主要国際会議International Conference on Autonomous Agents and Multiagent Systems 2023(AAMAS2023)に2年連続で研究論文が採択されたと発表した。
今回の成果の詳細は5月29日より英国ロンドンで開催される同国際会議にて発表を行った。
「AAMAS」は自律ロボットに関する国際的に権威のある主要国際会議の1つ。2023年は1,000件を超える投稿の中から、約45%の論文が採択されており、中でもOSXから採択された論文は、全投稿の23.3%の「Full Paper」(口頭発表あり)として選ばれた。OSXからの発表は6月1日10:45(現地時間)のセッションで行われた。
●採択された論文内容
Counterfactual Fairness Filter for Fair-Delay Multi-Robot Navigation
著者:浅野輝氏(東京大学、2022年3月からOSXインターンとして在籍)、米谷竜氏(㈱サイバーエージェント、執筆時OSX)、西村真衣氏(OSX)、小津野将氏(OSX)
研究背景:フードデリバリーやタクシー等の配送サービスを自律走行型のロボットで実現することを考えた場合、複数の自律走行ロボットが衝突することなく目的地へ最短で移動できることが重要。しかし、大半のロボットが効率よく目的地に到着できたとしても、大多数を優先して移動させたことで特定のロボットのみが遅延してしまっては、配送サービスにおける利用者の公平性を担保することができない。このように複数の自律走行ロボットを活用するには効率的で安全な移動を可能にすることに加え、各自律走行ロボットの待ち時間は均等にすることが求められる。
研究の概要:今回の研究では、「ナビゲーションの公平性」を定義する方法を考えたとしている。ロボットがどれだけ損をしているかという指標に注目。複数のロボットが同時に行動する場合、他のロボットとの衝突を避けるため、迂回や一時的に停止をする必要がある。その迂回や一時的停止により、最短経路から外れてしまうことで発生する最短時間からの遅れ時間をロボットの「損失」とみなし、各ロボットの損失のばらつきの大きさによりナビゲーションの公平性を定義した。
その公平性とできるだけ早く目的地に到達できる効率性の両立を、反実仮想推論(※1)を応用したアルゴリズムによって実現した。同アルゴリズムでは、ロボットは停止して道を譲るか、あるいは進み続けるかの判断を学習する。その学習は、道を譲ることによって他のロボットの損失がどの程度減るかに基づいて行うもの。そのような学習方法を使用することで、自分が道を譲る行為が他のロボットが目的地に早く到着する助けになる場合にだけ、道を譲るという選択をし、そうでなければ、そのまま進み続けるという意思決定を可能にする。これにより、今回の研究では公平さを維持しつつ、効率的に目的地に到着することを実現した。
※1:反実仮想推論とは、現実とは違う架空の状況を考え、その結果を予測する考え方。 例えば、「もし雨が降っていたら、私達は濡れていたかもしれない」というように、現実には雨が降っていない架空の状況に対して、もし雨が降っていたらどうなっていたかを考える推論。
研究の成果:提案手法の有効性を確認するため、周囲のロボットの状況から公平性を導出する既存の強化学習アルゴリズムと比較実験を行った。
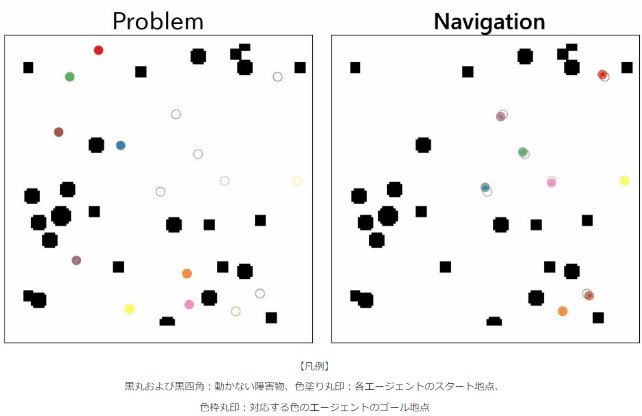
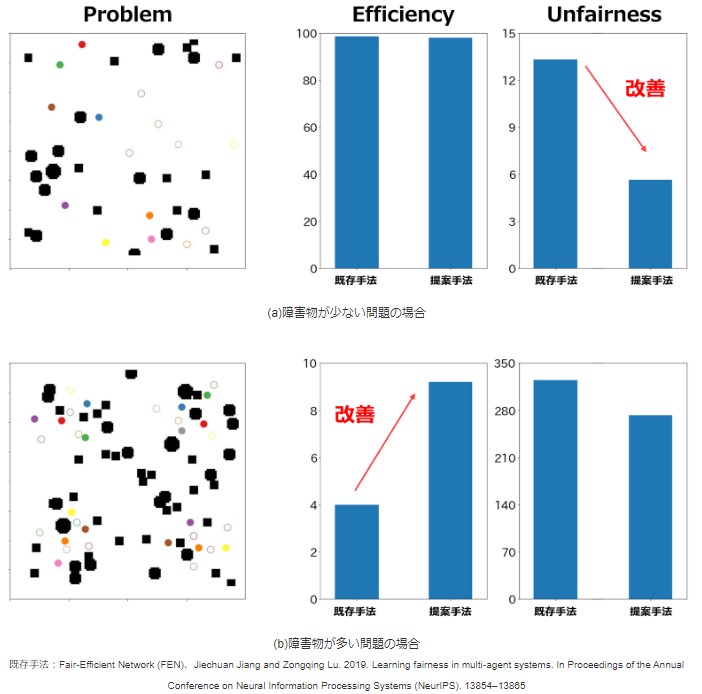
図2(a)に示す通り、障害物が少ない環境では既存の手法を用いることで高い効率性を示す一方、ナビゲーションに不公平な傾向があるほか、図2(b)の障害物が多い環境下では効率性が低下し、不公平な経路になる傾向がある。それらに対し、我々の提案手法では効率性を約2.3倍向上させ、不公平性を約16%減少させることができ、高い効率性と公平性の両立を実現した。
●今回の成果(オープンソースソフトウェアとして公開しており、以下のリンクから利用可能)
https://omron-sinicx.github.io/ncf2/
