![サプライチェーン~物流高度化へのどこでもドア[MF+]マテリアルフロー・プラス](../images/header-img_01.png)

- トップページ
- [最新ニュース]IT・マテハン
- 東大、リコーら、ドローンの障害物自動回避システム開発
[最新ニュース] IT・マテハン
東大、リコーら、ドローンの障害物自動回避システム開発
2017/03/15
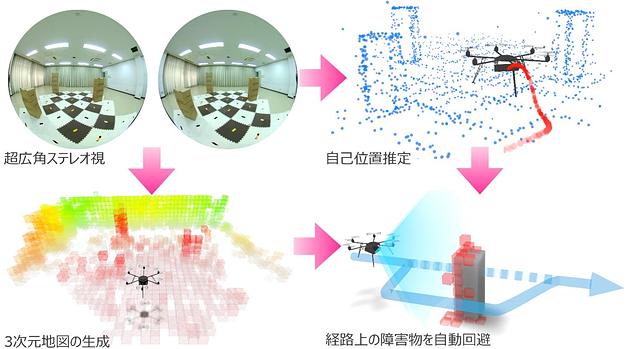
東京大学大学院工学系研究科航空宇宙工学専攻の鈴木真二教授、土屋武司教授、ラビクリストファートーマス助教らの研究グループは3月15日、(株)リコーおよびブルーイノベーション(株)と共同で、非GPS環境下でも安定して自動飛行するとともに経路上の障害物を自動で回避できるドローンシステムを共同開発し、飛行試験に成功したと発表した。
施設内・倉庫内の警備ならびに危険作業を伴う橋の下およびトンネルの中の点検など、GPS信号の受信が不安定または不可能な環境下で自律飛行する際の安全性が高まり、危険作業や目視困難な場所での作業等への貢献が期待される。
同研究の成果として、共同開発したシステムによるデモ飛行を、2017年3月23日~25日幕張メッセで開催されるジャパン・ドローン2017にて予定している。
●3Dビジョンシステムによるドローンの障害物自動回避のイメージ